







2025/04/24
1676
运动控制系统由什么组成_是什么构成了运动控制系统(MotionControlSystem)-PCIM展会门票领取,扫码预约入场
运动控制系统(Motion Control System)用于精确控制机械设备的运动轨迹、速度和位置,广泛应用于工业机器人、CNC机床、3D打印、自动化生产线等领域。其核心组成可分为 硬件 和 软件 两大部分:
1. 硬件组成
(1) 控制器(Controller)
功能:运动控制的核心大脑,负责计算运动轨迹、发送控制指令。
类型:
PLC(可编程逻辑控制器):适用于简单运动控制(如步进电机)。
专用运动控制器(如DSP、FPGA):用于高精度控制(如伺服电机)。
PC-Based 控制(如EtherCAT主站):适合复杂多轴协同控制。
(2) 伺服/步进驱动器(Driver)
功能:接收控制信号,调节电机电流,控制转速和扭矩。
伺服驱动器:支持闭环控制,精度高(如安川、松下)。
步进驱动器:开环控制,成本低(如雷赛、Leadshine)。
(3) 执行机构(Actuator)
伺服电机:高精度、高响应(如三菱、西门子)。
步进电机:低成本,适合低速场景(如42步进电机)。
直线电机/DD马达:无传动间隙,用于超精密控制(如半导体设备)。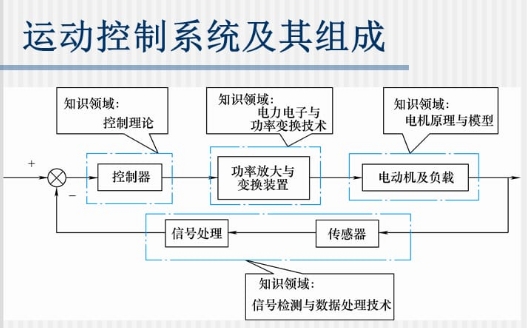
(4) 反馈装置(Feedback Device)
编码器(Encoder):
增量式(脉冲计数,成本低)。
绝对式(直接读取位置,断电不丢失)。
光栅尺(Linear Scale):用于直线运动的高精度检测(±1μm)。
霍尔传感器:检测电机转子位置(用于无刷电机)。
(5) 机械传动机构
减速机(如谐波减速器、行星减速机):提高扭矩,降低转速。
丝杠/导轨:将旋转运动转为直线运动(如滚珠丝杠)。
皮带/齿轮:用于动力传输。
(6) 人机交互(HMI)
触摸屏/操作面板:设定参数、监控状态。
上位机软件(如LabVIEW、CODESYS):编程与调试。
2. 软件组成
(1) 运动控制算法
PID控制:基础闭环控制算法,调节速度/位置。
前馈控制(Feedforward):减少跟踪误差(如CNC加工)。
轨迹规划(S曲线、T型加减速):优化运动平滑度。
(2) 通信协议
脉冲+方向(PUL/DIR):传统步进/伺服控制。
现场总线(如EtherCAT、CANopen、PROFINET):高速多轴同步。
工业以太网(如Modbus TCP、Powerlink)。
(3) 调试与仿真工具
示波器功能:分析电机响应曲线。
数字孪生(如MATLAB Simulink):虚拟调试优化参数。
3. 典型应用场景
| 应用领域 | 关键需求 | 典型配置 |
|---|---|---|
| 工业机器人 | 多轴协同、高动态响应 | 伺服电机+EtherCAT总线+绝对编码器 |
| CNC机床 | 纳米级精度、刚性控制 | 直线电机+光栅尺+前馈控制 |
| 3D打印机 | 低成本、开环控制 | 步进电机+脉冲控制 |
| AGV/物流设备 | 路径规划、避障 | 伺服驱动+SLAM算法 |
文章来源: PCIM电力元件可再生能源管理展
2025PCIM Asia Shanghai — 上海国际电力元件、可再生能源管理展览会暨研讨会将于2025年9月24日至9月26日在上海新国际博览中心举行。上海电子展门票领取及更多资讯,详情请点击:2025PCIM Asia Shanghai — 上海国际电力元件、可再生能源管理展览会暨研讨会
扫码实名预约,领取入场证!

| 凡本网注明“来源:广州光亚法兰克福展览有限公司”的所有作品,版权均属于广州光亚法兰克福展览有限公司,转载请注明。 凡注明为其它来源的信息,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点及对其真实性负责。若作者对转载有任何异议,请联络本网站,联系方式:020-38217916;我们将及时予以更正。 |

欢迎莅临:PCIM Asia Shenzhen — 深圳国际电力元件、可再生能源管理展览会暨研讨会!
电力电子、智能运动、可再生能源、能源管理
主办单位官方微信

